The Drivetrain
In previous years the way we would calculate our drivetrain gearbox ratios was with a publicly available google sheet called the JVN calculator. This calculator would give a rough top speed estimate based on data on motors, wheel diameter, and other factors. For my senior year of highschool I worked with our programming lead to develop a custom google sheet that would take a given distance (say the length of the field) and then for a given Motor, amount of motors, and wheel diameter it would solve for the fastest gear ratio. From this we determined that an optimal gear ratio.

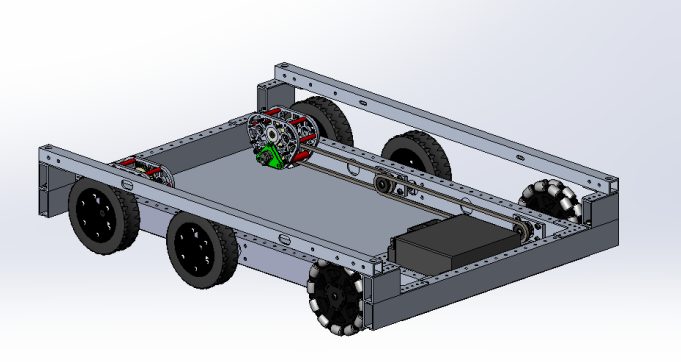


I designed the drivetrain to have 3 wheels on each side, with the front set being omni-wheels to decrease our turn radius. This also allowed for a more consistent turn.

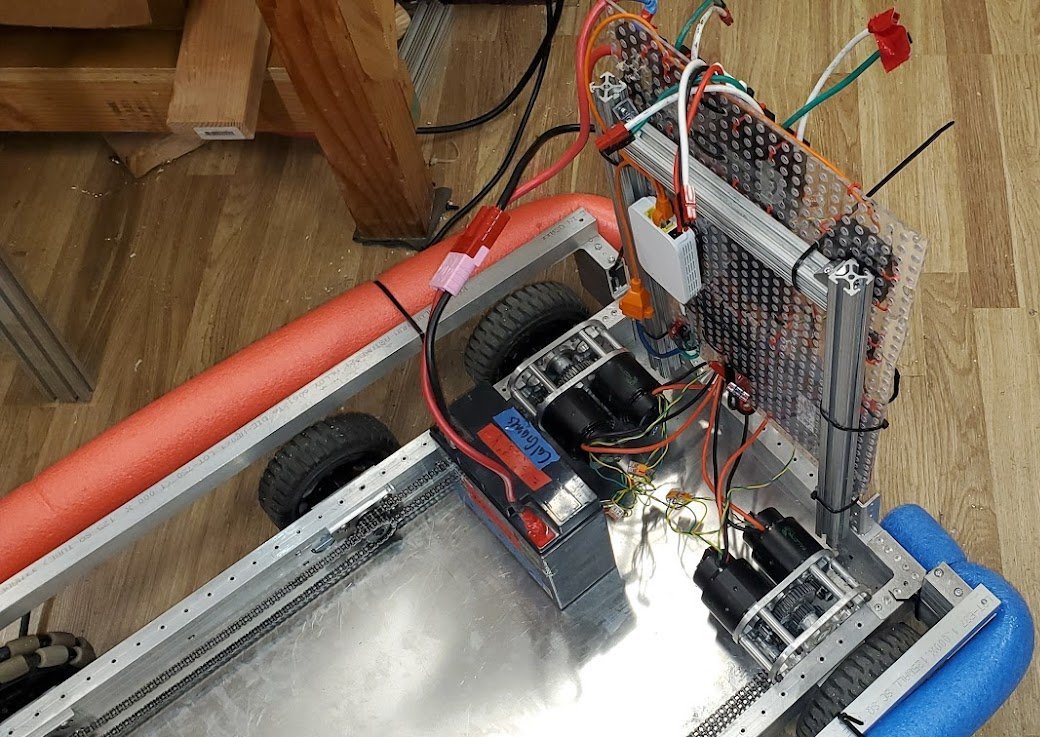
(battery mount not accurate to final version)
The frame